Pythonプログラミング(ステップ7・配列・線形代数・構造力学)
このページでは、NumPyライブラリの線形演算機能を用いる例として、簡単な構造力学計算を試してみたい。
トラス構造と力の釣り合いの式
橋梁などは、トラスと呼ばれる構造で設計される場合が多い。 下図は、0と8を支点とするトラス構造の例で、「硬い」棒を太線で表しており、棒の端点は「蝶番」のように自由に回転することができる。 ここでは簡単のために棒は十分軽く質量は無視できて、たわんだりすることもないとしよう。 棒は長手方向にわずかに伸縮することができて、そのばね定数を$k$とおく。 また、棒の長さは全て等しい(簡単のため1)とする。
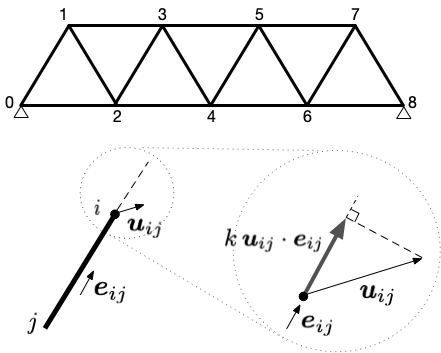
ここで端点$i$の釣り合いの位置からの変位をベクトル$\boldsymbol{u}_{i}$で表すことにしよう。 すると、$j$番目と$i$番目の端点を接合している棒の相対的な変形は $$ \boldsymbol{u}_{ij} = \boldsymbol{u}_{i} - \boldsymbol{u}_{j} $$ となる。 ここで、 $j$から$i$への単位ベクトルを$\boldsymbol{e}_{ij}$とおくと、変位が十分に小さければ、棒の伸び(縮み)の大きさは $ \boldsymbol{u}_{ij} \cdot \boldsymbol{e}_{ij} $ であって、それによって生じる力の大きさは(力の向きまで考慮すると) $$ {f}_{ij} = k \, \boldsymbol{u}_{ij} \cdot \boldsymbol{e}_{ij} $$ となる。 よって、それによって生じる力(ベクトル)は $$ \begin{eqnarray} \boldsymbol{f}_{ij} & = & k \, \left( \boldsymbol{u}_{ij} \cdot \boldsymbol{e}_{ij} \right) \boldsymbol{e}_{ij} \\ & = & k \, \boldsymbol{e}_{ij}^\top \boldsymbol{e}_{ij} \, \boldsymbol{u}_{ij} \end{eqnarray} $$ となる。
そうすると、端点$i$についての釣り合いは、端点$i$に作用する外力を$\boldsymbol{F}_i$とすれば、 $$ \sum_j \boldsymbol{f}_{ij} + \boldsymbol{F}_i = 0 $$ となる。
もし、棒の長さに比べて端点の変位が十分小さければ、$\boldsymbol{e}_{ij}$は一定と置いてしまっても良さそうだ(微小変形の仮定)。 すると、例えば水平から60度に立ち上がる棒については $$ \boldsymbol{e} = \begin{pmatrix} \cos(\pi/3) \\ \sin(\pi/3) \end{pmatrix} = \begin{pmatrix} 1/2 \\ \sqrt{3}/2 \end{pmatrix} $$ であるから、これから生成される行列(dyadic)は $$ A = \boldsymbol{e}^\top \boldsymbol{e} = \begin{pmatrix} 1/4 & \sqrt{3}/4 \\ \sqrt{3}/4 & 1/4 \end{pmatrix} $$ となる。 同様に、右下がり、および水平な部材については、それぞれ $$ \begin{eqnarray} B & = & \begin{pmatrix} 1/4 & - \sqrt{3}/4 \\ - \sqrt{3}/4 & 1/4 \end{pmatrix}, \\ C & = & \begin{pmatrix} 1 & 0 \\ 0 & 0 \end{pmatrix}, \\ \end{eqnarray} $$ である。
改めて釣り合いの式を書き直すと $$ - \sum_j K_{ij} \, \boldsymbol{u}_{ij} = \boldsymbol{F}_i $$ となる。あるいは、全く同じことであるが $$ \sum_j K_{ij} \, \boldsymbol{u}_{ji} = \boldsymbol{F}_i $$ ここで、$K_{ij}$は、$i,j$を接合する部材の種類毎に $k \, A$, $k \, B$, および $k \, C$ のいずれかである (この$K_{ij}$は部材剛性行列と呼ばれている。ここで$k$はバネ定数)。 この式をよく眺めると、$\boldsymbol{u}_i$を未知数とする連立1次方程式となっていることが分かる。 すなわち、外力$\boldsymbol{F}_i$を与えた際の、各端点の変位を、連立方程式から求めることができる。
部材を線形なバネで表現した場合でも、変形に伴なってトラスの形自体($\boldsymbol{e}_{ij}$)が変化するため、 厳密には非線形な問題となって、それを解くには別の工夫が必要となる。 ここでは、微小変形で線形な近似が可能な場合のみを考え、先に進もう。
剛性行列の生成
ここで、$i$番目の端点のx方向の変位を$u^i_x$、y方向の変位を $u^i_y$ と表すことにして、各点の変位をベクトル $$ \boldsymbol{U} = \begin{pmatrix} u^1_x \\ u^1_y \\ u^2_x \\ u^2_y \\ \vdots \\ u^7_y \end{pmatrix} $$ で表すことにする。
それに対応して、剛性行列を $$ K = \begin{pmatrix} k_{1,1} & k_{1,2} & \cdots & k_{1,14} \\ k_{2,1} & k_{2,2} & \cdots & k_{2,14} \\ \vdots & \vdots & & \vdots \\ k_{14,1} & k_{14,2} & \cdots & k_{14,14} \end{pmatrix} $$ とおいて、釣り合いの式に対応するように、要素を設定すれば良い。
具体的には、端点$i$が$j$と連結しているときに、部材剛性行列の要素を $$ K_{ij} = \begin{pmatrix} \alpha & \beta \\ \beta & \gamma \end{pmatrix} $$ とすれば(定義から$K_{ij}$は対称)、$i$での力の釣り合の式に $$ \begin{eqnarray} \cdots - \alpha u^i_x - \beta u^i_y + \alpha u^j_x + \beta u^j_y + \cdots = F^i_x \\ \cdots - \beta u^i_x - \gamma u^i_y + \beta u^j_x + \gamma u^j_y + \cdots = F^i_y \end{eqnarray} $$ という要素が現れるので、この式の右辺をすべての連結相手の$j$について足し合わせれば(重ね合わせれば)よい。 トラス構造では、$i$は複数の端点と連結されているのが通常であるから、$u^i_x$ および $u^i_y$ の係数は、複数の部材剛性行列の要素の和となる。
変位と同様に、各接点に作用する外力をベクトル表記 $$ \boldsymbol{F} = \begin{pmatrix} f^1_x \\ f^1_y \\ f^2_x \\ f^2_y \\ \vdots \\ f^7_y \end{pmatrix} $$ すれば、外力に対する変形は $$ K \boldsymbol{U} = \boldsymbol{F} $$ を解く問題に帰着される。
シミュレーション
以上の手順をPythonコードに翻訳してみた例を以下に示す。
3種類の部材剛性行列を配列A, B, Cで定義し、
次いで、接点の連結と対応する部材剛性行列の組を、リストtrussで与えている。
それらの情報を元に、剛性行列KMATの要素を決め、
接点4に下向きの荷重を加えた条件で、各点の変位Uを求めるという流れになっている。
# coding: utf-8
import numpy as np
import math
import matplotlib.pyplot as plt
from matplotlib.collections import LineCollection
A = np.array([
[1/4, math.sqrt(3)/4],
[math.sqrt(3)/4, 1/4]
])
B = np.array([
[1/4, -math.sqrt(3)/4],
[-math.sqrt(3)/4, 1/4]
])
C = np.array([
[1, 0],
[0, 0]
])
truss = [
[1, 0, A], [1, 2, B], [1, 3, C],
[2, 0, C], [2, 1, B], [2, 3, A], [2, 4, C],
[3, 1, C], [3, 2, A], [3, 4, B], [3, 5, C],
[4, 2, C], [4, 3, B], [4, 5, A], [4, 6, C],
[5, 3, C], [5, 4, A], [5, 6, B], [5, 7, C],
[6, 4, C], [6, 5, B], [6, 7, A], [6, 8, C],
[7, 5, C], [7, 6, A], [7, 8, B]
]
k = 200.0
N = 7
KMAT = np.zeros(shape=(N*2, N*2))
for x in truss:
i = x[0]-1
j = x[1]-1
mat = k * x[2]
KMAT[i*2,i*2] -= mat[0,0]
KMAT[i*2+1,i*2] -= mat[1,0]
KMAT[i*2,i*2+1] -= mat[0,1]
KMAT[i*2+1,i*2+1] -= mat[1,1]
if j>=0 and j<N:
KMAT[i*2,j*2] += mat[0,0]
KMAT[i*2+1,j*2] += mat[1,0]
KMAT[i*2,j*2+1] += mat[0,1]
KMAT[i*2+1,j*2+1] += mat[1,1]
F = np.array([
[0],[0], # 1
[0],[0], # 2
[0],[0], # 3
[0],[-1], # 4
[0],[0], # 5
[0],[0], # 6
[0],[0], # 7
])
U = np.linalg.solve(KMAT,F)
print(U)
cs = math.cos(math.pi/3)
sn = math.sin(math.pi/3)
nodes = [
[0,0], # 0
[cs,sn], # 1
[1,0], # 2
[cs+1,sn], # 3
[2,0], # 4
[cs+2,sn], # 5
[3,0], # 6
[cs+3,sn], # 7
[4,0] # 8
]
lines0 = [ ]
lines1 = [ ]
for x in truss:
i = x[0]
j = x[1]
x0 = nodes[i][0]
y0 = nodes[i][1]
x1 = nodes[j][0]
y1 = nodes[j][1]
lines0.append( [(x0,y0),(x1,y1)] )
x0 = x0 + U[(i-1)*2,0]
y0 = y0 + U[(i-1)*2+1,0]
if j>0 and j<=N:
x1 = x1 + U[(j-1)*2,0]
y1 = y1 + U[(j-1)*2+1,0]
lines1.append( [(x0,y0),(x1,y1)] )
lc0 = LineCollection(lines0, color='blue', linewidths=1)
lc1 = LineCollection(lines1, color='red', linewidths=2)
fig = plt.figure(figsize=(8,8))
ax = fig.add_subplot(aspect='1')
ax.add_collection(lc0)
ax.add_collection(lc1)
ax.autoscale()
plt.show()
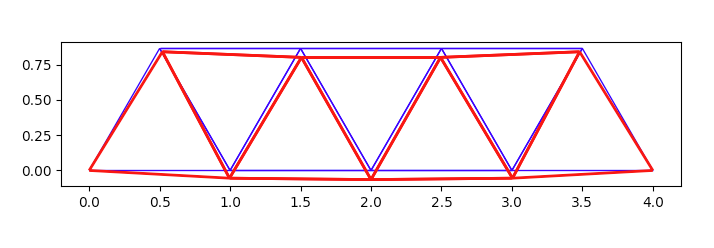
このコードを実行すると、外力が無い場合の初期位置を青、外力によって変形した状態が赤色で表示される。
 練習:構造計算
練習:構造計算
下図のようなトラス構造の場合について、同様の計算を行ってみなさい。
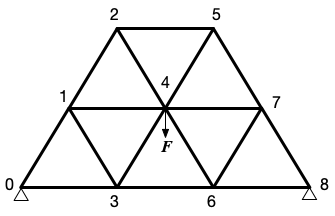
さらに、$K$が逆行列を持たないような場合は、どのような状況に対応するか、考えてみなさい。