Pythonプログラミング(ステップ7・配列・線形代数・画像の変形)
このページでは、NumPyライブラリの線形演算機能を用いる例として、画像処理(変形)について考えてみる。
配列データとしての画像
写真などの画像をデジタルデータとして扱う場合、平面を碁盤の目のように区切り、それぞれのマス目の明るさの程度を数値化して表現する。 そして、それぞれのマス目は画素、あるいは、画像(picture)の単位胞(cell)という意味を込めてピクセル(pixel)と呼ばれる。
モノクロ画像の場合は、各ピクセルには光の強度を表す数値が、カラー画像の場合は、光の三原色(赤、緑、青)それぞれの強度を表す3つの数値が割り当てられる (印刷等では、異なる色分解の方法が用いられる場合もある)。
加えて、複数の画像を重ねて合成する際に用いる情報として、「透明度」を表すアルファチャンネルが付加される場合がある。 アルファ値と呼ばれる数値が0の場合は、「下地」の色がそのまま透け、反対にアルファ値が最大の場合は、そのピクセルが下地を完全に覆う。 これを使って、例えば、透明な背景を持つ画像が表現できる。
ピクセルあたりの数値の数は「深さ」と呼ばれる。モノクロ画像でアルファチャネル無しの場合は深さは1、RGBカラーにアルファチャネル有りの場合は深さは4である。
光の強度、そしてアルファ値は、符号なしの8ビットの整数として表現・保存される場合が多い。 人間の目は、繊細な光の強弱を区別できないことと、一般に画像は非常に多くのピクセルから構成されるので (一般的なスマートフォンのカメラでも1000万画素程度に及ぶ)画素あたりのデータ量を節約する効果も期待できる。 その場合、「真っ暗」が0、最大の明るさが255に対応する。 アルファ値については、完全に透明が0、完全に不透明が255である。
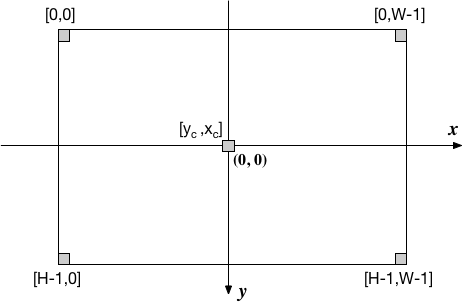
こうして、画素は二次元的な配列上に並ぶことになる。画像配列をDとすると
D[i, j, d]
は、画像の上からi行目、左からj列目のピクセルの、深さ方向にd番目のデータを表す。
つまり、左上が原点で、縦軸の向きが反転した座標系となっているので、注意が必要である。
深さ4の画像の場合、$d=0$が赤、1が緑、 2が青、そして4がアルファ値にそれぞれ対応する。
以下は、画像ファイルを読み込み、NumPyの配列に変換後、それを画面表示するコードの例である。
サンプル画像: bushtit.png
{kind=link}
# coding: utf-8
import numpy as np
from skimage import io
import math
# 画像の読み込み
image = io.imread('bushtit.png')
# NumPyの配列に変換
D = np.array(image)
H = D.shape[0]
W = D.shape[1]
depth = D.shape[2]
print("幅=",W,"高さ=",H,"深さ=",depth)
io.imshow(D)
io.show()
上記のコードの出力。 左上が画素座標の原点で、一般的な座標系とは、上下が反転していることに注意。
座標変換による画像の変形
$i$行$j$列目のピクセル値を $D_{ij}$ とすると、 座標の原点を$(x_c, y_c)$に置いたとき。画像面内の座標 $(x,y)$との対応関係は $$ i = y + y_c, \;\; j = x + x_c $$ となる。 以下では、座標の原点は、横方向の画素数を$W$ 縦を$H$とすれば、画像の中央 $$ x_c = W/2, \;\; y_c = H/2 $$ に取ることにしよう。
ここで、座標変換を表す行列 $$ A = \begin{pmatrix} a_{00} & a_{01} \\ a_{10} & a_{11} \end{pmatrix} $$ を与えて、$(x,y)$の画素を $$ \begin{pmatrix} u \\ v \end{pmatrix} = A \, \begin{pmatrix} x \\ y \end{pmatrix} $$ に移動する操作を全ての画素について行う。 すると、行列$A$に応じて、元の画像を変形させることができる。
この考えに従って画像の変形を行うコードの例を以下に示す。
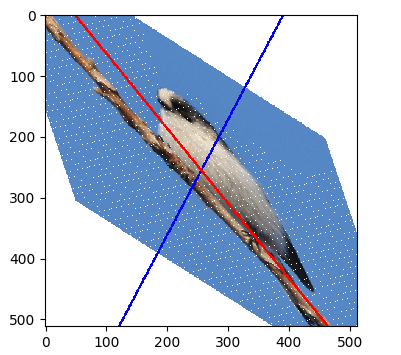
このコードでは、行列$A$の2つの固有ベクトルの方向を、赤と青の直線で、併せて表示するようになっている。
# coding: utf-8
import numpy as np
from skimage import io
from skimage.draw import line
import math
image = io.imread('bushtit.png')
D = np.array(image)
H = D.shape[0]
W = D.shape[1]
depth = D.shape[2]
T = np.zeros(shape=(H,W,depth), dtype='uint8')
# 画像の中心
xc=W/2
yc=H/2
# 変換行列
A = np.array([
[1.1, 0.3],
[0.7, 0.9],
])
# 座標変換
for j in range(W):
for i in range(H):
u = A[0,0]*(j-xc) + A[0,1]*(i-yc)
v = A[1,0]*(j-xc) + A[1,1]*(i-yc)
col = D[i,j,:]
j2 = int(u + xc)
i2 = int(v + yc)
if j2>=0 and j2<W and i2>=0 and i2<H:
T[i2,j2,:] = col[:]
# 固有値、固有ベクトル
eig,P = np.linalg.eig(A)
print('Eigenvalues=',eig)
print('Eigenvector=\n',P)
# 固有値が実数の場合、固有ベクトルの表示
if not isinstance(eig[0], complex):
for j in range(W):
for i in range(H):
d0 = abs(-P[0,0] * (i-yc) + P[1,0] * (j-xc))/math.sqrt(P[0,0]**2 + P[1,0]**2)
d1 = abs(-P[0,1] * (i-yc) + P[1,1] * (j-xc))/math.sqrt(P[0,1]**2 + P[1,1]**2)
if d0<2:
T[i,j] = [255,0,0,255]
elif d1<2:
T[i,j] = [0,0,255,255]
# 変換後の画像表示
io.imshow(T)
io.show()
上記のコードの実行した結果の例を以下に示す。 白い点は、移動先のマス目に対応する画素が無い場所に相当する。 このように、離散的な位置で定義された画素を連続的に変形すると、対応する画素が欠けたり不自然なギザギザが現れたりするため、 画像編集ソフト等では、周囲の画素情報を使ってデータを補う(補完する)ように工夫されている。
赤と青の線は、 変換行列の固有ベクトルの方向を表す。
 練習: 画像の変形
練習: 画像の変形
以下のような変形を実現するための変換行列を考え、上記のコードの配列Aに設定して、動作を確認してみなさい。
- 画像の左右反転(鏡像変換)
- 画像を反時計周りに45度回転
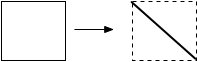
- 画像の上辺を左、下辺を右に「剪断的に」ずらす変形(下図)

- 画像が対角線上に潰されるような変形(下図)
発展練習: 画像の補完
周囲の画素を補完することで、画像を連続的に変形しても抜けた点が生じないよう、上記のコードを改良してみなさい。
 ヒント
ヒント
変形後の画素値が全て計算できるよう、元の位置の画素を逆変換で求めれば良さそうだ。